|
|||
|
|
|
||
| View Shopping Cart |
| Home |
| Guides Available |
| About the Author |
| FAQs |
| Testimonials |
| Articles |
| Contact Andrew |
| Terms & Conditions |
| Mailing List |
| Links |
 |
 |
Get more great
articles like this one absolutely free with every
Gibbs Guides e-magazine. Join
the mailing list!
How to Choose an Electric Power Sytem
A simple guide for RC modelers - Part 2
Article by Andrew Gibbs

Electronic Speed Controller (ESC)
Now to choose the ESC. We’ve already decided the target current
in this example is 33 Amps. It’s well worth having significant spare
ESC capacity, and I recommend an ESC with a minimum of 25% more capability
than the expected current. Spare ESC capability will cause the ESC to
run cooler and it may be expected to be more reliable too, than one which
is operated right at the limit of its capability.
There is merit in choosing an ESC with as much as 50% excess capability, as this allows for increases in motor current if for any reason it’s desired to run the system at a higher power than originally anticipated. In this case then, the ESC rating would be a minimum of 42A (33A x 1.25 = 42A), but the preferred ESC rating would be as much as 49 Amps. (33A x 1.5 = 49.5A). In this case then, we’ll choose an ESC capable of operating on 3 cells and capable of handling at least 49 Amps.
ESC question - should you use a BEC, or not?
Another thing to decide on is if a BEC (battery eliminator circuit) function
is required for supplying power to your RC equipment. For a small model,
a BEC is generally a good idea as it will help particularly to keep the
weight of the model down.
The motor and prop
Finally, it’s now time to think about the motor and propeller. This
is probably the most complex part of the process.
Motor current rating
We already know we need a motor capable of running on a 3S battery and
demanding a current of around 33 Amps. Motors which are operated at close
to the limit of their capability tend to run inefficiently, whereas motors
with plenty of spare performance will return much better efficiency and
last longer. So, it’s a particularly good idea to choose a motor
with plenty of spare capacity. I’d suggest at least a 33% margin,
which means that even though we are only planning on drawing 33 Amps,
we will be looking for a motor capable of at least 44 Amps continuous
current (33A x 1.33 = 43.9A, rounded up to 44).
|
Choosing a motor with spare capacity will help a lot in keeping it running cool and efficient (click small images to enlarge). |


Motor Kv
The Kv of a motor is the rpm per volt which the motor will turn at, without
a propeller fitted. For example, a motor with a Kv of 1,000 will turn
at 8,000 rpm when supplied by an 8 Volt battery. When the motor is turning
a prop, the load imposed by the prop will cause the rpm to fall. The rpm
will generally drop to between 80% and 85% of the motor’s Kv figure.
So in this case, when the motor is turning a prop, the rpm will be somewhere
around 6,500 rpm or so.
Propeller matters
For any given motor and battery combination, it is the propeller which
determines the current which is demanded. The larger the prop, the greater
the current will be. All else being equal, the higher the Kv of the motor,
the smaller the prop will need to be to avoid an excessive current demand.
Diameter and pitch
Props are referred to by reference to their diameter and pitch. For example,
a propeller with a diameter of 10 inches and a pitch of 7 inches would
be called a ‘10 by 7’, written 10x7. The diameter is the dimension
from one tip to the other. The pitch is also given in inches, and refers
to the distance the prop moves forward with each complete rotation. A
5 inch pitch means that the prop will try to pull itself forward 5 inches
with each complete rotation in flight, whereas an 8 inch pitch will try
to move 8 inches. In practice, the actual distance will depend principally
on how much drag the model has.
Pitch, diameter & absorbed power
The pitch and diameter of the prop are important factors to bear in mind.
The diameter in particular has a big effect on the power absorbed by the
prop at a particular rpm. The pitch also has a significant effect, but
it’s much less significant than the effect of diameter.
The power absorbed by a prop is only part of the story. It’s also important that the pitch and diameter chosen suit the needs of the airframe.
Pitch to diameter ratio
The pitch to diameter ratio (p/d ratio) is another important factor to
consider when thinking about how suitable a prop might be for a particular
application. For example, a prop with a diameter of 12 inches and a pitch
of 6 inches has a p/d ratio of 0.5. Conversely, a 8x8 prop has a p/d ratio
of 1.0. Models which are intended for relatively slow flight (e.g. scale
draggy biplanes, and models used for 3D and hovering flight) are best
equipped with low p/d ratio props, perhaps as low as 0.4 or so, whereas
high speed models are best with a high ratio, up to 1.0. A sport model
such as we are considering here would probably fly best with a prop having
a p/d ratio somewhere around 0.7 - 0.8.
Choosing a suitable combination of motor Kv and prop
At this point, we know we need a motor capable of running at 44 Amps or
more on 3 cells. However, we also need to decide on the motor’s
Kv rating, and at the same time we need to choose a suitable propeller.
Although it’s possible to calculate the power a particular combination of motor Kv and prop will demand, it’s a very complex process and it does not lend itself to a simple rule of thumb type of calculation. So, we need some help with this.
Method 1 - Using reference tables
The easiest way to deal with this problem (and eliminate almost all of
the working out so far!) is to use the quick reference tables in the Gibbs
Guide Power System Solutions.
An example of one of the tables is shown below. This table is for 350
Watt power systems and 3S batteries – exactly what we need in this
example. The table shows the specification of four complete power systems.
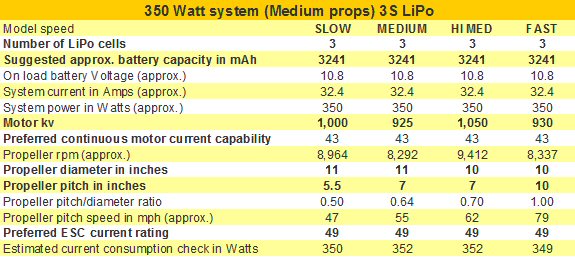
Notice that the suggestions in the table almost exactly match those which we have arrived at after our calculations, plus it takes all the work out of working out a suitable motor Kv and a suitable propeller.
The model is a fairly fast sport model, so we’d use column 3 for the high medium model speed category (HI MED). The system which the table suggests is as follows: 3 cell lipo battery, approx. 3,241mAh, a motor Kv of around 1,050, a 10x7 prop and a 49A ESC. The prop has a p/d ratio of 0.7, and is thus likely to be suitable for this moderately fast model.
Method 2 – Website search
If you’re not using the quick reference tables in the Gibbs Guide
Power System Solutions, you’ll
still need to decide on a suitable motor Kv and a suitable propeller for
your model. The easiest way is to search seller’s websites to find
data about a motor’s performance. Unfortunately, not all sellers
provide sufficient information to make an informed choice, although this
situation is improving.
Ideally you are looking for test results of the motor with various props. It’s essential that the test results were obtained with the same cell count (e.g. 3 cells) as you wish to use. In this case you’ll be looking for a motor that can handle around 43A continuously, but has been tested at around 33A to give you the 350 Watts you need. You are also looking to check the p/d ratio of the prop will be about right for your model.
Motor Dimensions
An obvious point is to check that any motor you are considering will fit
the space available.
Testing
Which ever method you use to decide on your power system, it’s important
to ground test any new power system and check the current consumption.
This allows you to check that that none of the components are being operated
at too high a current, and allows you to be sure of the power provided
by the system.
It's worth bearing in mind that the actual power and current consumption depend on many factors including the actual motor Kv, the characteristics of the chosen prop, the battery voltage, its state of charge and its temperature. With so many variables, the measured power and current are unlikley to be exactly what has been predicted. This is why it's important to test a new system - if we don't, we have no real idea of what's going on.
Remember that for any given combination of motor, propeller and battery, it is principally the propeller that determines the power and current demanded. If the power consumed is substantially more, or perhaps less, than expected, a change of propeller may be required to correct the situation.
|
|


When ground testing, make sure the model is firmly restrained and always position yourself behind the prop. It’s a good idea to confine ground runs to a short periods, perhaps no more than 30 seconds or so, since the cooling air flow will probably be less than when the model is in flight. For EDF models, keep ground testing runs very short as there will probably be no air flow over battery or ESC. Always check the motor, battery and ESC temperature after ground testing any model.
Flight testing is the final phase of proving a power system. It's a good idea to keep the first flight quite short, maybe just a couple of minutes or so. After landing, inspect the model for any signs of a problem with its power system. Has anything worked loose? What temperature are the battery, ESC and motor? If they are any more than comfortably warm, the cooling arrangements may need to be examined again. If all is well, recharge the battery and extend the duration of the next flight, again inspecting the model after flight.
If you are happy with the way the model flies, and all is well with the power system then that marks the end of testing. However, you may feel a need to experiment with different propellers. For example, if the model is too lively for comfort, then a prop with a smaller diameter or pitch may be worth considering. Conversely, if a little more performance is desired, a prop with a little more pitch may provide the required gains. Be careful about increasing diameter, since small increases in diameter can result in large changes in current consumption. Any time the prop is changed, especially if the pitch or diameter have increased, it is well worth testing the power system again.
Conclusion
A well chosen electric power system may be expected to give many trouble
free flights, especially if good quality components have been chosen.
I hope this article has been helpful. If you’d like more information about this subject, then the three-part series on Electric Power Systems is an excellent resource.